COMPASS 오차 측정의 종류와 방법
Ⅰ. 서론
항해에 있어 정확한 방위값의 확보는 절대적으로 필요한 요소이지만, GPS·AIS 등 항해 장비의 발달로 과거에 비해 항해사들이 소홀히 하고 있는 것이 사실이다. 그러나 Black out으로 인한 Gyro Compass의 작동 불능 상황 또는 심한 Gyro compass의 오차값은 안전 항해에 큰 위험요소로 작용할 수 있으므로 항상 오차값을 파악하고 보정하는 것이 중요하다.
Ⅱ. COMPASS 오차 측정을 위한 방위각법
Compass Error는 진자오선(TRUE NORTH)과 선내 Compass의 남북선(COMPASS NORTH)이 이루는 교각을 의미하며, compass 오차 측정 방법으로는 일출몰방위각법, 시진방위각법, 계산고도방위각법, 북극성방위각법 등 이 있다.
1. GYRO ERROR 측정법
(1) 중시선을 이용해 구하는 방법
항해 중 뚜렷한 두 물표의 중시선을 통과할 때 실제로 측정한 자이로 방위와 해도상의 진방위를 비교하여 구하는 방법
(2) 접안 중 고정된 물표를 통해 구하는 방법
- ① RADAR를 통해 물표를 정한다.
- ② EBL을 통하여 물표의 방위값을 확인한다.
- ③ Gyro Compass를 이용해 실제 값을 측정한다.
* 측정결과 RADAR 값은 257.7°이었으며, 실제 측정값은 257.9°도로 0.2° 오차값이 존재하였다.
(3) 부두 접안후 본선의 GYRO HEADING과 해도상의 부두방위를 비교하여 Gyro Error를 구하는 방법

<XXX호의 Gyro Error 오차 구하기>
- 1. XXXXX Port에 접안한 본선의 위치를 파악한다.
- 2. CHART에 표시 되어있는 부두의 방위각을 확인한다. (330.0°)
- 3. 본선의 Gyro Heading 값을 측정한다. (330.1°)
- 4. 본선의 Gyro Error값을 파악한다. (0.1E°)
* 본선이 부두와 평행하여 접안 할 것을 전제로 한다.
(4) 시진방위각법에서 태양방위각표를 이용하는 방법
- ① AZIMUTH TABLE을 이용 해당되는 위도를 각 PAGE의 위쪽에서 찾는다.
- ② 오전이면 왼쪽 란, 오후면 오른쪽 란에서 시시(오전이면 12 - t를, 오후이면 t를 시간단위로 고친 것)를 찾아 관측시의 적위에 해당하는 "Dec."란에서 표 값을 구한다.
- ③ 이때 위도와 적위가 동명이면 제2부의 "Declination-Same Name As-Latitude"라고 쓰인 페이지에서 찾고 이명이면 제3부의 "Declination-Contrsry Name To-Latitude"라고 쓰인 페이지에서 찾는다.
- ④ 각 페이지 적위(Dec.)란의 바로 밑에는 1년 중 태양의 적위와 같은 값을 갖는 날짜가 적혀 있으며 태양 관측시에는 천측력을 사용치 않고 날짜만으로도 표 값을 구할 수 있다.
- ⑤ 이와 같이 구한 표 값 즉 진방위각에는 동명극의 부호 N 또는 S를 앞에 붙이고 출시이거나 천체가 자오선의 동쪽에 있으면 E를, 몰시이거나 천체가 자오선의 서쪽에 있으면 W를 뒤에 붙임.
(5) 계산 고도 방위각표를 이용하는 방법
이 표는 항해삼각형에서 자오선각, 위도 및 적위를 알고 방위각과 고도를 구하는 표이며 주로 고도와 방위각을 동시에 구함으로서 위치선의 요소를 결정하는데 이용되나 색성에도 이용되고 또 방위각만을 구할 때에도 이용된다.
이 표에 기재된 표값은 위도와 자오선각은 1도, 적위는 30' 내지 수도 간격으로 된 변수에 대한 것으로 COMPASS의 오차를 계산하기 위해서 방위각을 구할 때에는 표에 기재된 방위각을 위도, 자오선각 및 적위 등 3요소에 대하여 3중보간(Triple interpolation) 을 행하여야 한다.
방위각을 구하는 요령으로
- 1) 관측지점의 위도에 가장 가까운 위도 및 관측시에 대한 적위와 자오선각에 가장 가까운 값을 사용, 표의 Az란에 있는 방위각을 구한다.
- 2) 자오선각, 적위 및 위도에 대한 보간치를 각각 구한다. 이 보간치는 실용상 00.1 단위까지로 충분함.
- 3) 2)에서 구한 보간치의 대수합을 구하여 종합 개정치로 하고 이것을 1)에서 구한 방위각에 가감하여 정확한 방위각을 구함.
- 4) 3)에서 구한 방위각의 앞에는 동명극의 부호 N 또는 S를 붙이고 뒤에는 자오선각과 같은 부호 E 또는 W를 붙인다.
2. 자차(DEVIATION) 측정법
실무에 있어서 상기 방법에 의한 자이로 오차 측정 시 Gyro Course와 Magnetic Course를 비교하여 적어두고 PILOT CHART나 사용 중인 해도상에서 편차를 구하여 자차를 구한다.
간편하게 예를들면, T(진북)-(편차)-M(자북)-(자차)-C(나북) 로 외우고, 진북에서 자북으로 :편차, 자북에서 나북으로 :자차라고 외우면 간편하다.
- T : Gyro Compass Heading : 250
- C : Mag. Compass Heading : 255
- 차트에 표기된 편차(VARIATION) : 3W, M : 253
- 이때의 자차(DEVIATION)은 ? 2W
3. XXX 호의 Gyro Error 구하기
먼저 stop watch를 준비한 뒤 azimuth circle로 태양 방위 측정하고 Gyro course, Magnetic course, LAT, LONG, UTC를 기록한 후 시간 correction을 한다.

- UTC : 06h23m00s 30th APR 2021
- bearing : 277.2 Magnetic bearing : 276.4
- Latitude : 13°04.177 N Longitude : 100°53.902 E
- Variation : 4.7 W
The nautical almanac, rapid sight reduction table for navigation으로 값을 구하면 다음과 같다.
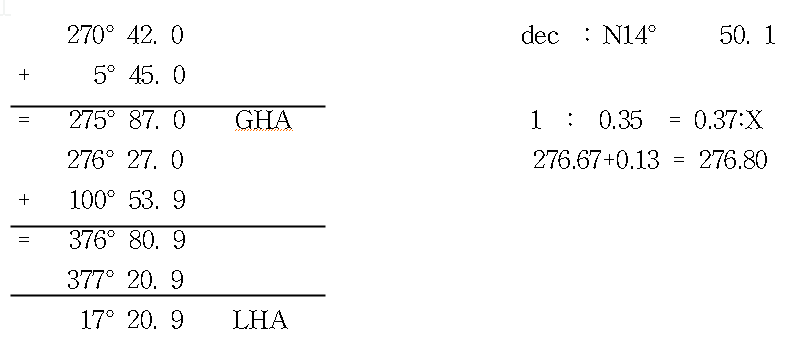
TB : 276.8
GB : 277.2
GE : 0.4W
CB : 290.5
CE : 3.9 W
VAR: 4.7 W
DEV: 0.8 W
즉, 본선의 Gyro Error 값은 0.4W로 양호한 편임을 알아 낼 수 있었다.
Ⅲ. GYRO COMPASS ERROR 수정법 (고정 ERROR)
1. MAIN GYRO를 돌려서 수정
- 1) AUTO PILOT 전면의 COVER를 연다. (나사 4개)
- 2) GYRO의 몸체 고정나사를 푼다. (나사 4개)
- 3) MAIN GYRO를 빼낸다.
- 4) GYRO와 몸체 고정대 나사를 조금씩 푼다. (나사 4개)
- 5) GYRO를 돌려서 ERROR 수정
- 6) 역순으로 조립
2. 내부 DATA상 수정법 - 특히 주의를 요함
- 1) PANEL 조작부의 DISP를 눌러서 LED가 TRUE에서 COMPASS로 전환시킨다.
- 2) SET를 누른다.
- 3) 전시되는 값이 점멸되면 -, +를 눌러서 ERROR를 수정
- 4) 수정 후 ENTER를 누른다.
3. GPS 관련 ERROR를 없애는 방법 (현재 본선은 GPS가 미설정되어 있음)
- 1) GPS 관련 ERROR는 속도나 위도에서 GPS MODE에 설정시 발생됨
- 2) 속도나 위도에서 GPS가 설정되면 LAMP ACK를 눌러서 BUZZER을 없애고 속도나 위도 위치에서 GPS MODE를 다른 MODE로 전환시킨다.
- 3) TRUE에서 ENTER를 누르면 ERROR가 소멸됨
4. 본선의 GYRO INTERFACE UNIT과 GYRO REPEATER의 값이 크게 다를 경우 이를 조정하여야 하며 그 기준이 되는 값은 GYRO INTERFACE UNIT이다.




댓글